“Foot rigging” by Sean Hewitt
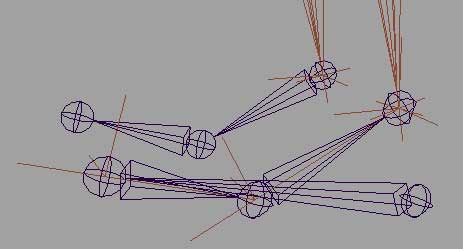
You may notice that since we copied this chain of joints from the foot rig we added the IK too, their end effectors duplicated over too. So let’s duplicate the end effectors on the RIG chain we made.
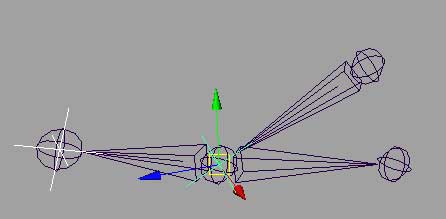
Unparent all the joint chains so we just have 4 nodes floating in space. Then select the ankle and parent it under the ball joint. With the ball joint selected parent it under the toe joint. And then with the toe selected, parent it under the heel joint.
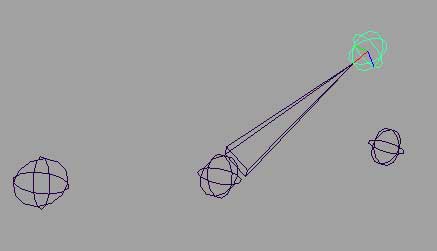
If you move the heel around now it should control the whole thing. Undo any repositioning you do.
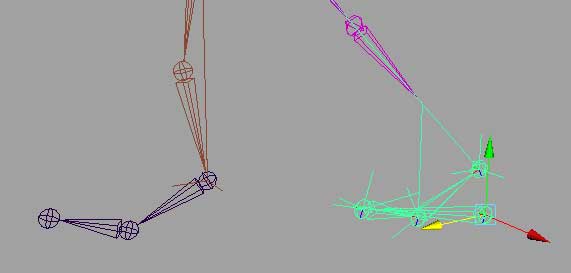
We’re going to take the IK handles we have on the skinning rig joints and parent them under the new rig. Parent the legIK under anklRIG. Parent the ballIK under the ballRIG. Then parent the toeIK under the heelRIG.
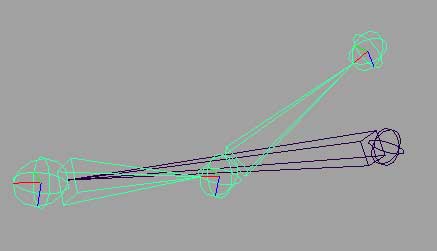
Test it out and see the effect we get from translating around the rig by the heel or rotating various joints on the heel. Make sure to Undo any repositioning while you’re testing.
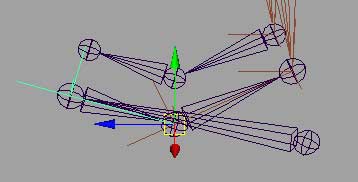
You can see that the rig allows some of the rolling of the foot we were talking about, as well as keeps the foot planted on the floor until the joints can no longer reach the floor. Now we have to address some of the other motions we’d like control over that this automated rig does not currently provide.
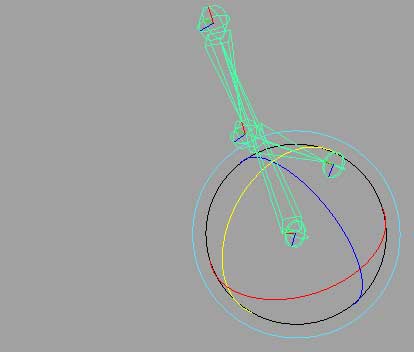
Select the toeIK and group it. Name the new group lf_toetapRIG. Should be pretty obvious this will serve to tap the toe later. Either hit insert on your keyboard to enter adjust pivot mode, or just hold down the d key and snap the pivot point to the ball joint. Hit insert again to exit adjust pivot mode, if that’s how you went about it. Don’t forget the v key toggles on snap to point. If you hold down d then v you can toggle everything on, place it then release the keys to finish.
Foot rigging
Popular Tutorials
-
 Free set of photo references for our members
Posted on Nov 15, 2010
Free set of photo references for our members
Posted on Nov 15, 2010
-
 Photo References
Posted on Oct 6, 2010
Photo References
Posted on Oct 6, 2010
-
 Modeling Competition
Posted on Dec 10, 2010
Modeling Competition
Posted on Dec 10, 2010
-
 Modeling a High Definition Building – part 1
Posted on Dec 9, 2010
Modeling a High Definition Building – part 1
Posted on Dec 9, 2010
-
 FREE photo reference sets for you – only for registered members
Posted on Oct 2, 2011
FREE photo reference sets for you – only for registered members
Posted on Oct 2, 2011
Try something new

Latest Comments