“Foot rigging” by Sean Hewitt
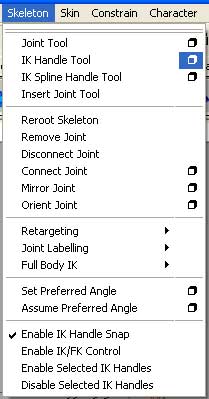
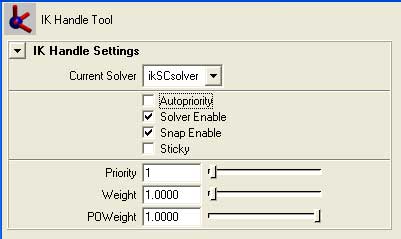
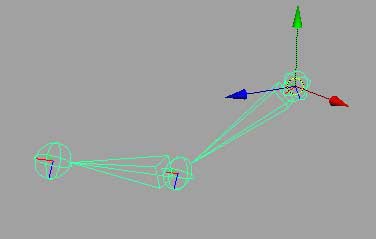
I’m going to make to RP solver IK handles. One from the ankle to the ball, and one from the ball to the toe. On a side note, if you’re using the simple game rig provided, I had named the ankle the heel (not sure why :p ). So let’s rename this joint ankle. (so if you’re on the left side lf_ankle) Name the new IK handles we made lf_ballIK and lf_toeIK, respectively.
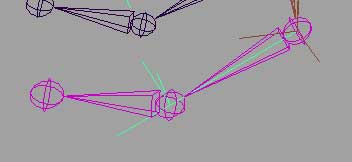
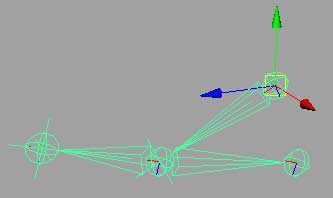
We’re going to need some sort of rig to drive these IK handles if we’re to use them. Something that can rotate them around in relation to the foot rig we already have our geometry skinned to. So since we need joints that correspond to the rig we already have there, lets select the heel (I’m going to start building on the left side so lf_heel) and duplicate it. Since the ball and toe were under the heels hierarchy they were duplicated as well, which we want. I’m going to rename these joints by adding the suffix RIG to the end of them so we can tell them apart from our skinning joints we already have. So we end up with lf_heelRIG, lf_ballRIG and lf_toeRIG.
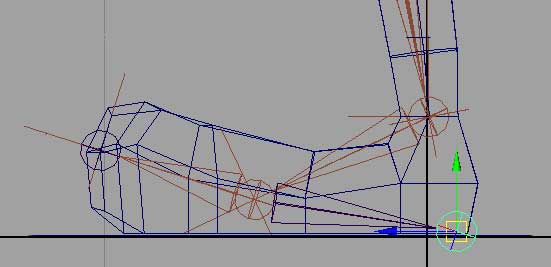
I’m going to hide our skinning foot joints so we don’t confuse them with the joints we just made (so I’m left with just the blue joints and not the orangish ones) FYI, cntrl+h is hide selected, alt+h is hide unselected and cntrl+shift+h is show last hidden.
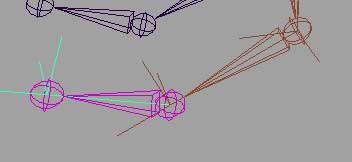
What we’re going to do is make a chain of joints in the reverse order of the foot we have now. Were going to go from heel to toes to ball to ankle in this chain. Seeing as how there was no ankle before, let’s duplicate the toe joint and move it back to the heel. If your foot is angled like mine you may want to point snap the heel in X to get it back inline with the rest of the foot. Try to place it near where you’d want the heel of your character to pivot. Not so much in the center of the heel.
Foot rigging
Popular Tutorials
-
 Free set of photo references for our members
Posted on Nov 15, 2010
Free set of photo references for our members
Posted on Nov 15, 2010
-
 Photo References
Posted on Oct 6, 2010
Photo References
Posted on Oct 6, 2010
-
 Modeling Competition
Posted on Dec 10, 2010
Modeling Competition
Posted on Dec 10, 2010
-
 Modeling a High Definition Building – part 1
Posted on Dec 9, 2010
Modeling a High Definition Building – part 1
Posted on Dec 9, 2010
-
 FREE photo reference sets for you – only for registered members
Posted on Oct 2, 2011
FREE photo reference sets for you – only for registered members
Posted on Oct 2, 2011
Try something new

Latest Comments